

All Products
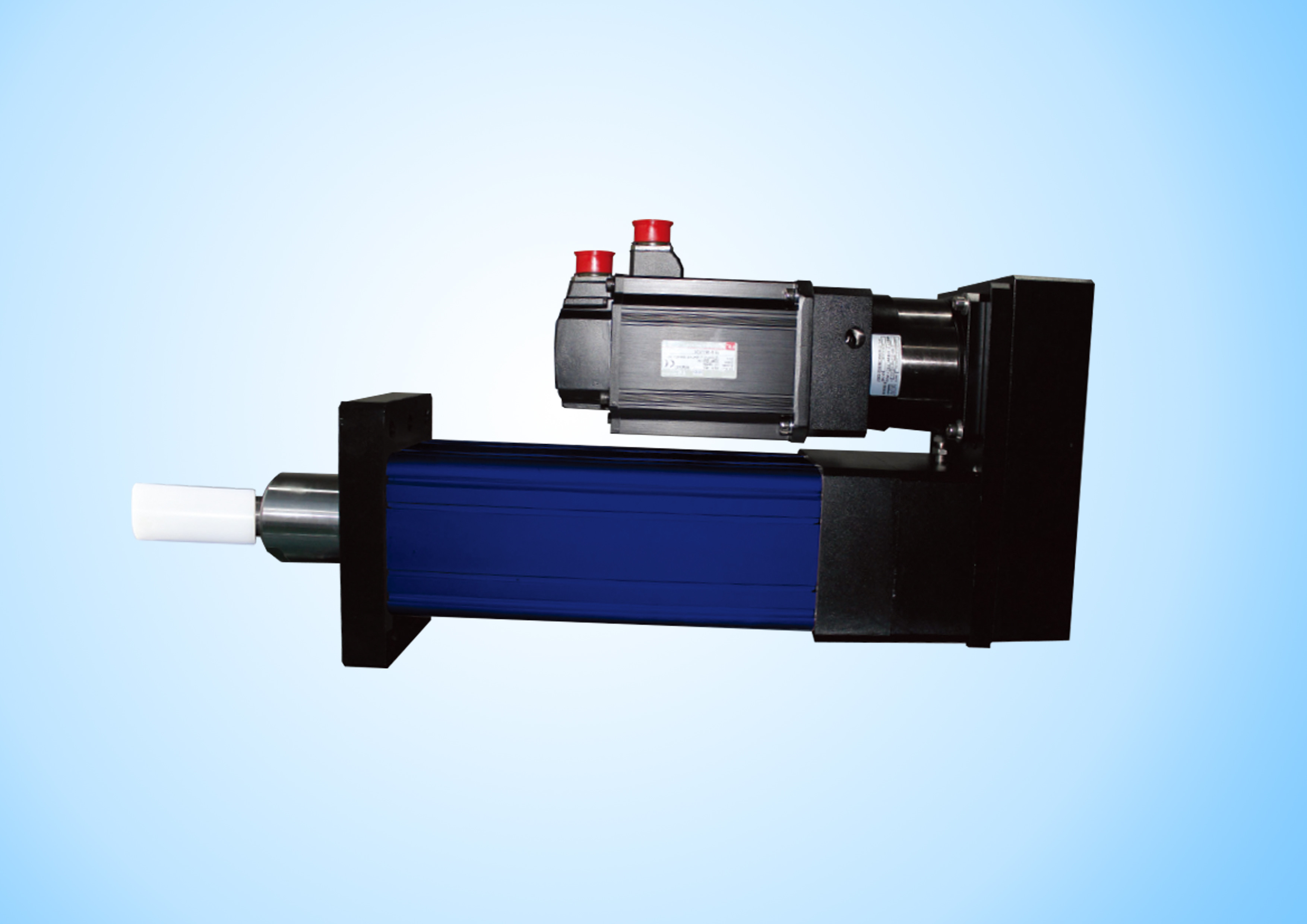
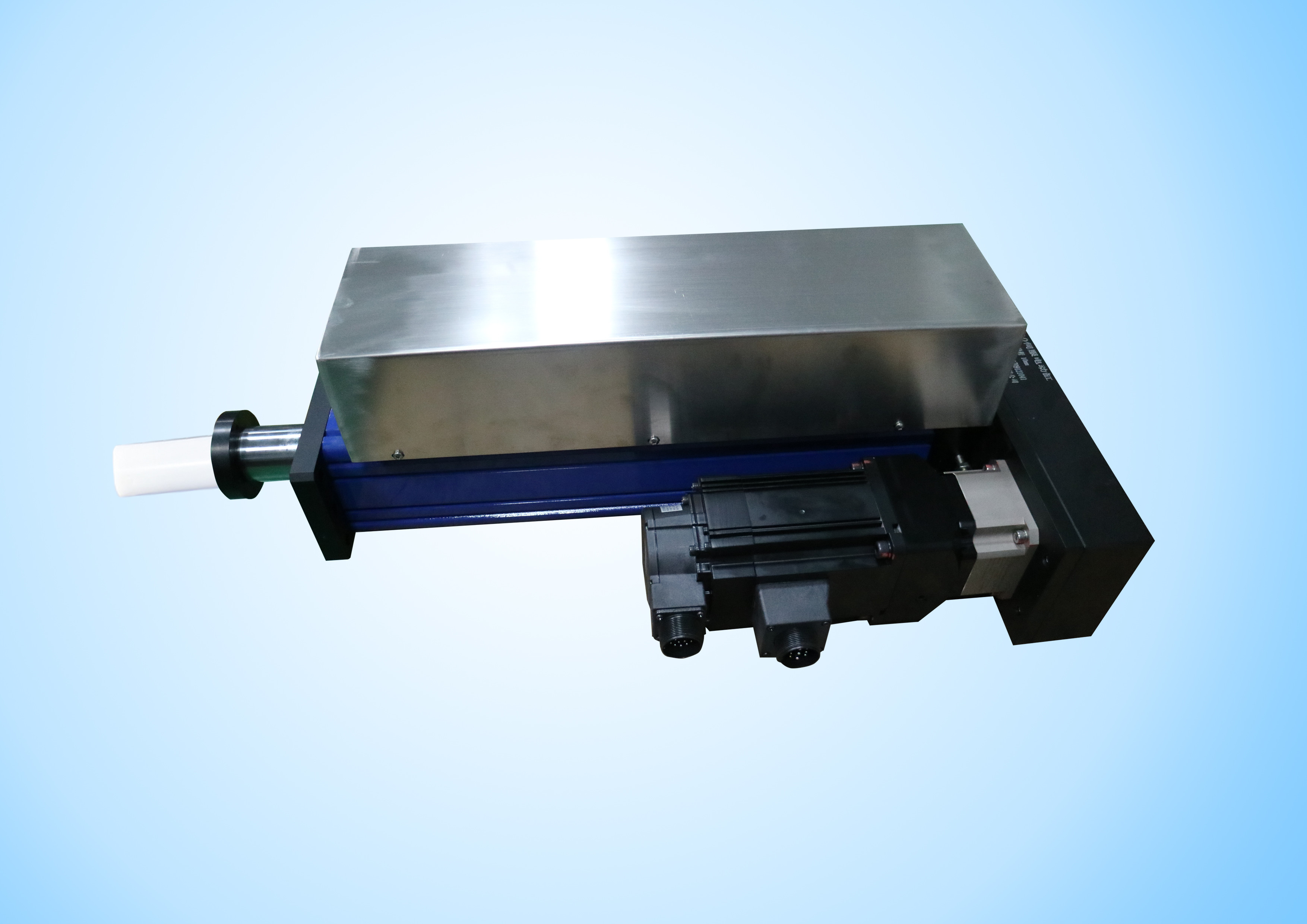
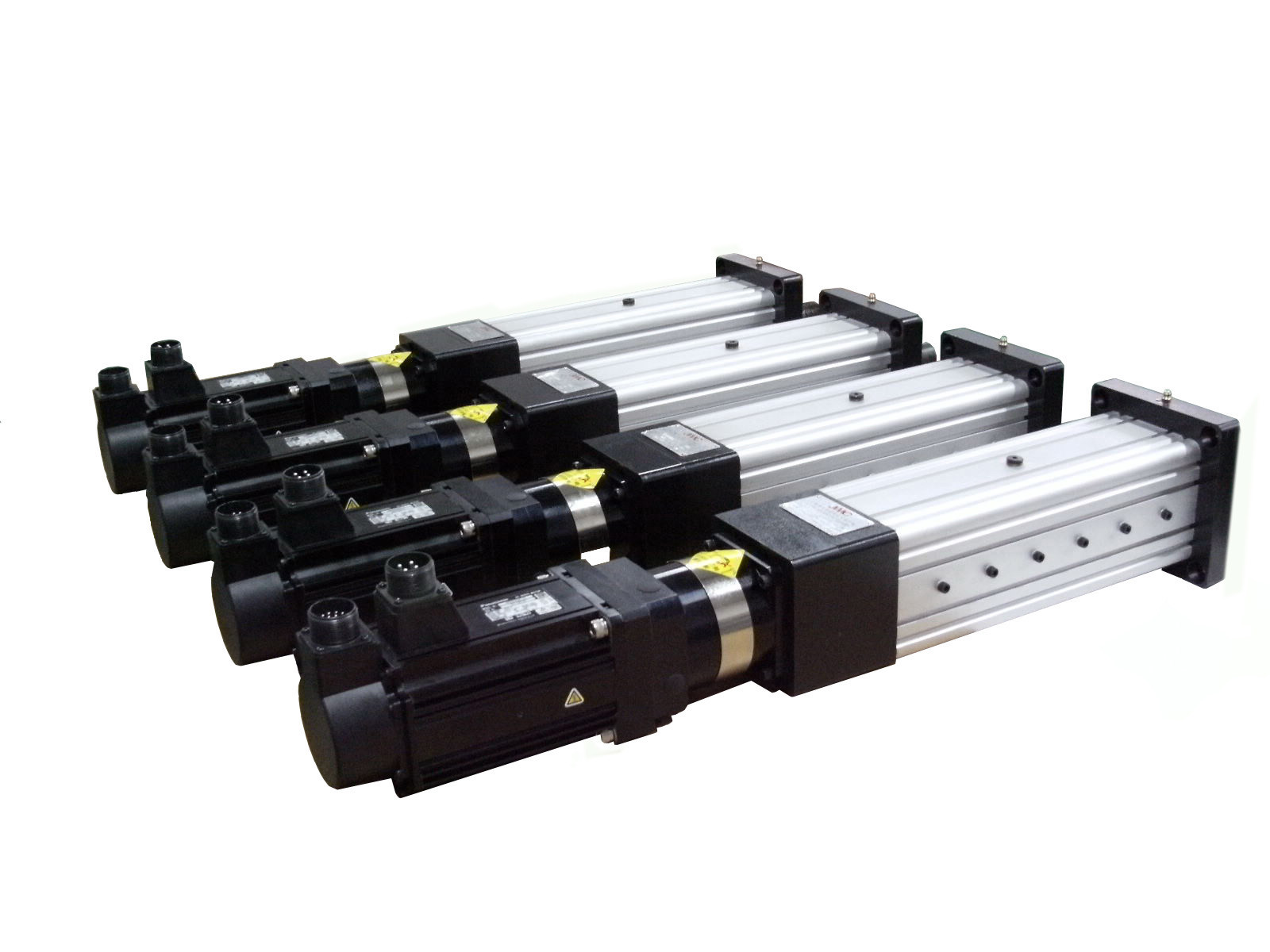
220V High Speed Aluminium Linear Electric Cylinder With 0.45KN-350KN Output Force




| Place of Origin | China |
|---|---|
| Brand Name | TJ |
| Certification | ISO9001:2008,CE |
| Model Number | TJE040,TJE065,TJE075,TJE095,TJE110,TJE135,TJER160,TJER190,TJER220,TJER250 |
| Minimum Order Quantity | 1 pcs |
| Price | negotiable |
| Packaging Details | external packing:carton or non wooden box;cushion packing:EPE foam |
| Delivery Time | 3~4 weeks |
| Payment Terms | T/T,30% payment in advance,70% before delivery |
| Supply Ability | 800 pcs per month |
Product Details
| Material | Aluminium Profile | Speed | ≤150 Mm/s |
|---|---|---|---|
| Load | 10kg~30t | Stroke | ≤2m |
| Repeatability | ±0.01mm | Output Force | 0.45KN~350KN |
| Motor Connection Type | Linear/parallel | Internal Anti-rotation | With/without |
| Highlight | waterproof linear actuator,cylinder actuating linear,350KN Linear Electric Cylinder |
||
Product Description
1. Operational Principle
The electric cylinder is a linear motion that converts the rotating motion of the motor into the push rod through the rotating motion of the screw and the screw pair. By using the closed-loop control characteristic of servo motor, the precision control of thrust, speed and position can be realized conveniently, and the program can be realized by using modern motion control technology, numerical control technology and bus (network) technology. Because of its control and convenience, it can realize the precision motion control that cylinder and hydraulic cylinder drive can not realize.
2. Features:
TJE series electric cylinders adopt advanced modular design, with the feature of :
★ Compact structure and small dimension
★ High performance, low inertness, low noise ,high response
★ High reliability and long operating life
★ Application technology of both ball screws and roller screws
★ Convenient assembly and use, energy saving,simple maintenance
| Material |
★ Shell : forging aluminium alloy, smooth ,elegant appearance. ★ Extension Rod : high alloy steel, corrosion resistant. |
| Precision |
★ Usually take both repeatability and motor precision into consideration. Should not take push rod of electric cylinder as guidance for straightness.The customer should design own guide mechanism. ★ Motor being connected parallel will decrease the precision compared with connected directly because it need to through synchronous belt gear. |
| Velocity | ★ Take the lifetime into special consideration under motion in high velocity(more than 200mm/s).The loading ability and precision will both decrease at the same time. |
| Stroke | ★ The stroke of model-selected should be 20-50mm larger than the effective stroke because we need to save space for slowing down and stopping after the push rod meeting the limited switch.Faster speed , larger space. |
| Thrust | ★ Gear drive will bring more thrust than synchronous belt drive under motor in parallel. |
| Operational Cycle Time | ★ Run frequently(more than 50%) or continuously by using ball screw. |
| Motor Choice |
★ AC servo motor: high precision, high velocity ,great thrust and equilibrium step. ★ Stepping motor: high precision, slow velocity and not very great thrust (less than 600kg). ★ Normal DC motor can be implemented to regulate speed but not be positioned. ★ Normal asynchronous motor can't be regulated speed and positioned. |
Special Production(Optional):
★ Special installation,preservation,dust prevention, dampproof
★ High&low temperature environment
★ Waterproof at sea, anti-explosion work
★ Linear displacement sensor
★ Pressure sensor
★ Resistance swing mechanism
★ Planetary gearbox
★ Motor: AC servo motor, DC brushless motor, stepping motor,DC motor,AC frequency conversion motor, etc.
3. Product Model Definition
![]()
![]()
![]()
Example:TJER160 S300 B R 05 A M C 10 05 0 P11 O/C N/P
|
TJER160—Series No.
TJER190 TJER220 TJER250 |
S300—Effective Stroke
TJER160:50~1500mm TJER190:50~2000mm TJER220:50~2500mm TJER250:50~3000mm |
B—Screw Type
B:Ball Screw C:Roller Screw |
|
R—Anti-rotation
T:Without |
05—Screw Lead TJER190:10,20mm TJER220:10,20mm TJER250:10,20mm |
A—Motor Mounting Type B:Parallel |
|
M—Cylinder Mounting Type
M1:Double side mount M2:Side turnnion mount M3:Front flange mount M4:Rear flange mount M5:Rear clevis mount M6:Rear shaft mount MX:Customized
|
C —Load Connection Type
C1:Male C2:Female C3:U-bolt C4:Ball head hinge CX:Customized |
10—Power
01:100W 02:200W 04:400W 08:750W 10:1000W 20:2000W 30:3000W |
|
05—Reduction Ratio
05:Five-to-one 10:Ten-to-one 20:Twenty-to-one |
2—Number Of Limit Switches
(Default is normally open NPN switch) |
O/C—Limit Switches
O:Normally Open C:Normally Close
|
|
N/P—Sensing Type
N:NPN P:PNP |
| Grating ruler + Force sensor |
|
Force sensor:① 4-20mA ② 0-10V Grating ruler:① TTL 24V ② RS422(5V Difference) |
|
If lacking of the part,it means without either grating ruler or force sensor. P01:Only with grating ruler TTL(24V) P10:Only with grating ruler 4-20mA |
Mark:
1)In order to ensure the effective stroke, two ends need to be reserved 5mm space.
2)The sensor couldn’t be mounted on the same side of the motor when the motor is parallel mounted.
4. Electric Cylinder Selection Guidance
(1) The relationship between the motor output torque and the output force of the electric cylinder:
F=T×η×2π×R/L
★ F: electric cylinder output force, Unit: Kn
★ T: motor output torque, Unit: Nm
★ R: Reduction ratio
★ L: Screw lead,Unit: mm
★ η: efficiency (generally the total efficiency is 85%, but the actual efficiency will chage,it is based on the actual use conditions)
(2) The electric cylinder working life
The life of the electric cylinder generally refers to the internal use of the electric cylinder screw.It can be divided into two parts:
1). screw fatigue life, it can be got by calculating;
The following is a calculation method of the fatigue life .
L10=(Ca/Fm)3×L
★ L10: The life of the electric cylinder,unit: Km
★ Fm: Average load of electric cylinder,unit: Kn
★ Ca: Screw nut basic dynamic load, unit: Kn
(can be detected by screw samples)
★ L: Screw lead,unit: mm
2). another life, depending on the conditions of use ( such as temperature, dust, using the type of lubrication, and periodically add frequency, etc. ).This kind of life is often drawn from the experience.
(3) The calculation of the average load
Average load means:A cube average value be calculated according to the force,speed,time in different working areas during a working cycle.
The change in load of the electric cylinder
As shown below:
![]()
The average load of the electric cylinder is calculated as follows:
![]()
5. Peripheral Parts List
![]()
| Name | Explanation |
| 1- HNC/CRHNC Foot mounting part | When the motor is mounted parall,this part is used for installing bearings and reducer end caps. |
| 2- FNC/CRFNG Flange mounting part | When the motor is mounted parall,this part is used for installing bearings and reducer end caps. |
| 3- ZNCF/CRZNG Trunnion mounting part | When the motor is mounted parall,this part is used for installing bearings and reducer end caps. |
| 4- LNZG/CRLNZG Trunnion bearing | For trunnion mounted on the cylinder block. |
| 5- SNC Double clevis bearing | For the motor mounted parallel. |
| 6- LSNG Spherical hinge clevis bearing | For the motor mounted parallel,with spherical bearing. |
| 7- LSNSG Spherical hinge clevis bearing | For the motor mounted parallel,with spherical bearing, welding synthesis. |
| 8- SNCS Double clevis mounting part | For the motor mounted parallel,with spherical bearing. |
| 9- LBG Double clevis bearing | For the motor mounted parallel,with spherical bearing. |
| aJ- Double clevis mounting part | For the motor mounted parallel. |
| aA- Double clevis mounting part | For the motor mounted parallel,with spherical bearing. |
| aB- Double clevis mounting part | For the motor mounted parallel. |
| aC- Clevis bearing | For the motor mounted parallel. |
| aD- Spherical hinge Clevis bearing | For the motor mounted parallel,with spherical bearing. |
| aE- Trunnion bearing | For being mounted to any position of the cylinder.If the motor is mounted parallel,the mounting position couldn’t near the motor. |
| aF- Foot mounting part | For the motor mounted axially. |
| aG- Joint bearing | With spherical bearing. |
| aH- Connecting flange | For compensating radial deviation. |
| aI- Double clevis | For the cylinder swing in a plane. |
| bJ- Self in connection part | For compensating radial and angular deviations. |
| bA- Right angle spherical hinge clevis bearing | For joint bearing. |
| bB- Double clevis | For the cylinder swing installation. |
| bC- Guiding unit | Prevent cylinder from twisting under high torque |
| bD- Proximity Switches | For testing the position, can be integrated in the sensor mounting slot. |
| bE- Slot cover | For preventing dust from entering. |
| bF- Parallel installation components | For the motor mounted parallel. |
| bG- Axial installation components | For the motor mounted axially. |
6. Compared With Hydraulic Cylinder & Pneumatic Cylinders
| Items | Electric cylinder | Hydraulic cylinder | Pneumatic Cylinders | |
|
Cost comparison |
Operations | Easy | Complex | Complex |
|
Environment influence |
Environmental & safe | Oil leak | High noise | |
| Safety | Safe | Oil leak | Gas leak | |
| Energy loss | Low loss | High loss | High loss | |
| Lifetime | Very Long | Can be long with proper maintenance | Can be long with proper maintenance | |
| Cost performance | High | Low | Low | |
| Maintenance | Almost maintenance free | Frequent & high cost | Regular & high cost | |
|
Function comparison |
Velocity | Very high | Medium | High |
| Acceleration | Very high | Medium | High | |
| Rigidity | Very high | Low | Low | |
| Load ability | High | High | Medium | |
| Shock resistance ability |
High |
High |
Medium |
|
| Efficiency | >90% | <50% | <50% | |
| Location control | Easy | Hard | Hard | |
| Location precision | Very high | Medium | Medium |
7. Application areas:
★ Military equipment:radar, missile erector, armored vehicle swing platform, special equipment and other warships and aircraft hatch,opening, seat height adjustment, weapon tracking system,actuator,experimental lifting support, tank artillery high and low direction action adjustment, The push of rocket fuel, the opening of furnace door, etc.
★ Special equipment:industrial automation production line, assembly line, logistics transmission, lifting platform, offset control, valve control, coordinate manipulator, mechanical equipment CT Kama knife, food and medicine industry, CNC machine tools, industry packaging machine, Automotive electronic press, textile equipment winding machine indexing, die position control, clamping, drilling, positioning.
★ Experimental Equipment: Simulation platform, test bed, wave machine, testing equipment etc.
This type is especially suitable for servo pressing, motor assembly production line and you can also purchase our servo pressing software together.
![]()
![]()
![]()
8. Maintenance
★ Electric cylinder is refueled with lubricating grease GB7324-1994 general lithium base 3 lubricating grease when leaves factory.
★ After electric cylinder has run for 300 hours, refill the lubricating grease. Refueling frequency, per 2000hours one time as usual, it is determined on basis of the operating environment and day-to-day operational time.
★ Refueling method: open the filler hole on the shell of electric cylinder, turn the screw to find the filler hole on the screw nut and refuel lubricating grease.
★ Requirement for lubricating grease:GB7324-1994 general lithium base 3 lubricating grease.
Recommended Products